COSYS-AIRSIM: A REAL-TIME SIMULATION FRAMEWORK EXPANDED FOR COMPLEX INDUSTRIAL APPLICATIONS
Wouter Jansen 외 · 2023 · ANNSIM 2023, pp. 37–48
관련도: 상 · 읽은 이유: SIL 자동화, 연구를 위한 기반으로 활용
산업용 로봇의 '눈(센서)'과 '두뇌(알고리즘)'를 실제 현장 투입 전 가상 공간에서 완벽하게 트레이닝할 수 있도록 돕는 물리 엔진 기반의 디지털 샌드박스이다.
One-liner
Microsoft의 AirSim을 기반으로 물리 기반 센서 모델(LiDAR, Pulse-Echo 등)과 동적 객체 및 절차적 환경 생성 기능을 확장하여 복잡한 산업용 로봇 알고리즘 검증을 지원하는 오픈 소스 시뮬레이션 프레임워크이다.
Problem
기존의 AirSim은 드론 연구에 집중되어 있어, 복잡한 산업적 요구사항을 충족하기에 한계가 있었다. 특히 센서 배치 최적화, 정교한 Simultaneous Localization And Mapping (SLAM) 검증, 실내 환경의 다양성 확보를 위한 환경 변화 기능, 그리고 재질과 기상 영향을 고려한 물리적으로 정확한 센서 데이터 생성 능력이 부족했다. 상용 시뮬레이터들은 고가이며 접근성이 낮아 학계와 중소기업에서 사용하기 어렵다는 문제도 존재한다.
Core Idea
Unreal Engine의 강력한 렌더링 성능을 활용하여 물리 기반 센서 모델링을 구현하고, 런타임에 객체를 배치하거나 상태를 변경하는 Changeable Objects 시스템과 절차적 환경 생성 기능을 AirSim에 통합했다. 이를 통해 사용자는 수동적인 환경 구축 없이도 무수히 많은 변종 환경에서 로봇의 성능을 검증할 수 있다.
Method
물리 기반 센서 모델링
- GPU-Accelerated LiDAR: 단순한 레이 캐스팅을 넘어, GPU 셰이더를 통해 표면 재질(Lambertian target reflectance)과 입사각에 따른 반사 강도를 실시간으로 계산한다.
- Weather Impact: 비(rain)에 따른 성능 저하 모델을 통합하여 강수량에 따른 포인트 클라우드의 강도와 거리 오차를 시뮬레이션한다. (는 측정 거리, 는 비 산란 계수)
- Pulse-Echo: 생체모방 pulse-echo RADAR의 특성을 주 대상으로, 신호의 전파, 반사, 감쇠 과정을 레이 트레이싱으로 구현했다. 프레임워크의 Echo 센서는 초음파(SONAR) 및 레이더(RADAR) 양쪽 설정을 지원한다.
환경 및 객체 관리
- Object-based Instance Segmentation: 수백만 개의 객체에 고유한 라벨과 색상을 부여하여 정교한 센서 지면 진리(Ground Truth) 데이터를 생성한다.
- Changeable Objects: 문, 창문, 이동하는 사람, 지게차 등 객체의 상태를 파라미터화하여 시뮬레이션 중 동적으로 변경한다.
- Procedural Generation: 외부 도구에서 정의한 규칙과 제약 조건에 따라 런타임에 벽, 랙, 화물 등을 배치하여 새로운 맵을 생성한다.
Results
아래 결과들은 본 논문이 프레임워크 검증 사례로 인용한 것으로, Navigation과 SLAM 수치는 Schouten, Jansen, and Steckel (2021)의 실험에서 유래한다.
| 영역 | 주요 성과 | 비교/수치 | 출처 |
|---|---|---|---|
| Navigation | 실제 환경과 시뮬레이션 환경에서 차량 제어기의 고우선순위 행동 활성화 시간 비교 | 유사도 | Schouten et al. (2021) |
| SLAM | Pulse-Echo 기반 SLAM 위치 추정 오차 검증 | 95% 구간에서 3.2m 이내 오차 | Schouten et al. (2021) |
| Data Gen | LiDAR 세그멘테이션용 합성 데이터 생성 | 실세계 실내 데이터셋 부족 문제 해결 | 본 논문 |
Key Figures
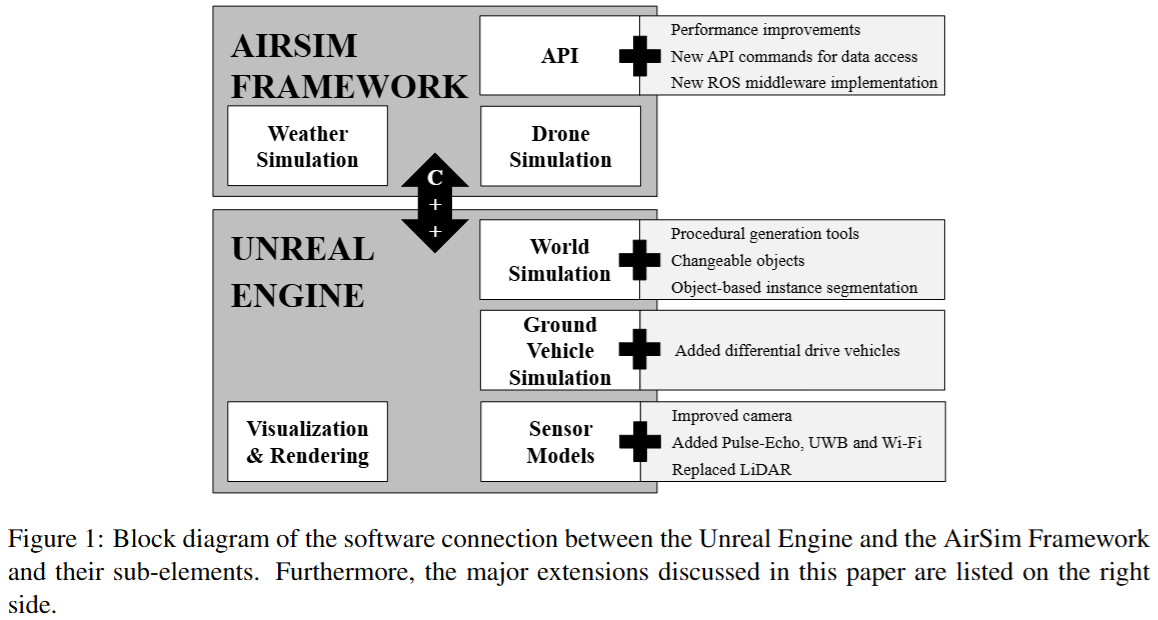
- Fig. 1: Unreal Engine과 AirSim Framework 간의 연결 구조 및 확장된 API, 센서, 차량 모듈 요약.

- Fig. 3: 실제 물류 창고 및 실외 환경과 시뮬레이션 내에서 재현된 디지털 트윈 환경의 시각적 비교.
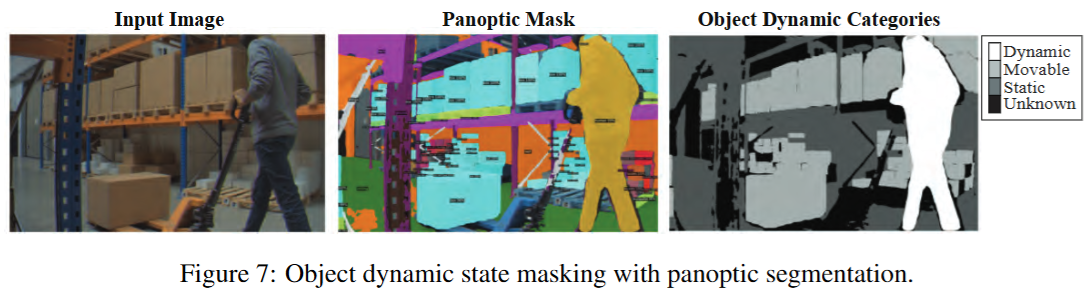
- Fig. 7: 정적(Static), 이동 가능(Movable), 동적(Dynamic) 객체를 구분하는 파놉틱 세그멘테이션 마스크 예시.
Contribution vs Limitation
저자 주장
- 물리적으로 정확한 실시간 LiDAR 및 전파 기반 센서 모델링 제공.
- 절차적 생성 및 동적 객체 시스템을 통한 데이터 다양성 극대화.
- ROS 미들웨어 지원 및 성능 최적화를 통한 실시간 시뮬레이션 달성.
저자가 밝힌 한계
- 실시간성을 유지해야 하는 제약 때문에 시뮬레이션 속도 저하시 물리/애니메이션 시스템에 오차가 발생할 수 있다.
- 향후 더욱 정교한 물리 연산을 위해 Fixed-step 시뮬레이션 모드 도입이 고려되어야 한다.
이 프레임워크는 특히 산업용 AGV의 실내 자율 주행 및 SLAM 검증에 강력한 도구이다. 단순히 시각적 재현을 넘어 센서의 물리적 특성(재질 반사 등)을 깊이 있게 다루고 있어, Sim-to-Real gap을 줄이는 데 크게 기여한다. 다만, 고도의 물리적 상호작용(물체 파손, 복잡한 접촉 물리 등)보다는 센서 데이터의 정확한 재현과 환경의 통계적 변주에 더 치중되어 있다.
Quotes
"The challenge of keeping the simulation capable of running in real-time continues to be one of its complex constraints." (p.10)
"Using the simulator, we can quickly create an environment that closely resembles the specific use case and create a data set with which we can train a neural network." (p.9)
Idea Seeds
- 동적 디지털 트윈 동기화: 실제 현장의 IoT 센서 데이터를 API로 수신하여, 시뮬레이션 내의 'Changeable Objects'(예: 열린 문, 작동 중인 컨베이어 벨트) 상태를 실시간으로 동기화하는 관제 시스템 구축.
- 에지 케이스 자동 생성: 강화학습 에이전트가 실패하는 지점을 분석하여, 절차적 생성 규칙을 통해 해당 취약 시나리오를 집중적으로 생성 및 학습시키는 루프 구현.
For My Writing
본 논문은 산업용 자율 주행 로봇의 SLAM 성능을 평가하기 위한 고충실도 시뮬레이션 환경 구축의 핵심 사례로 활용할 수 있다. 특히 시뮬레이션 기반 학습(Simulation-based learning) 시 합성 데이터의 품질이 모델의 일반화 성능에 미치는 영향을 논의할 때, 물리 기반 센서 모델링의 필요성을 강조하는 근거로 인용하기 적합하다.
Open Questions
이해하지 못한 것
- UWB와 Wi-Fi 센서 모델에서 다중 경로 간섭(Multi-path interference)이나 복잡한 실내 전파 회절이 어느 수준까지 실시간으로 계산되는가.
저자가 다루지 않은 것
- 여러 대의 로봇이 협업하는 멀티 에이전트 시나리오에서의 통신 지연 및 간섭 시뮬레이션.
- Unreal Engine 5의 최신 기능(Lumen, Nanite)이 시뮬레이션 성능과 물리적 정확도에 미치는 영향.
Links
- 선행 연구: Shah et al. 2017 (AirSim 원본 논문, FSR 2017)
- 관련 논문: Schouten et al. 2021 (Pulse-Echo Radar 시뮬레이션 및 SLAM 검증)
- 관련 프로젝트: UnrealCV, ROS (Robot Operating System)
References
- arXiv: 2303.13381
- IEEE Xplore: 10155352
- Code: github.com/Cosys-Lab/Cosys-AirSim
- BibTeX key:
cosysairsim2023jansen
@inproceedings{cosysairsim2023jansen,
author = {Jansen, Wouter and Verreycken, Erik and Schenck, Anthony and Blanquart, Jean-Edouard and Verhulst, Connor and Huebel, Nico and Steckel, Jan},
booktitle = {2023 Annual Modeling and Simulation Conference (ANNSIM)},
title = {COSYS-AIRSIM: A Real-Time Simulation Framework Expanded for Complex Industrial Applications},
year = {2023},
pages = {37-48},
keywords = {Industries;Simultaneous localization and mapping;Machine learning algorithms;Atmospheric modeling;Transfer learning;Sensor systems and applications;Real-time systems;sensors;procedural generation;digital twins;transfer learning;open-source},
doi = {10.48550/arXiv.2303.13381}
}